Kurond ha sido mi primera criatura creada para moverse con ML Agents. Es ineficiente por que su cuerpo esta MAL DISEÑADO.
Demosle un vistazo:
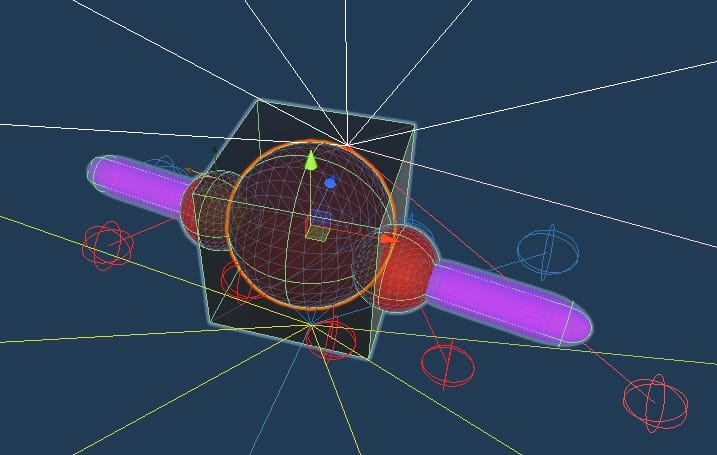
La parte central esta formado por una esfera, dentro de un cubo. La esfera tiene dos esferas conectadas mediante un character joint a la esfera principal.
Las dos esferas tiene conectado una capsula mediante un fixed joint que no tiene movimiento.
El agente puede mover las dos esferas conetadas por el character joint con total libertad de rotación. Por lo que solo tiene dos piezas movibles que son esas especies de brazos que tiene.
Como observaciones tenemos:
- Vector con el forward del codo derecho.
- Vector con el up del codo derecho.
- Vector con el forward del codo izquierdo.
- Vector con el up del codo izquierdo.
- Vector con la dirección al target.
- Vector forward del cáracter.
- Vector Up del caracter.
- Distancia al target.
Un total de 22 observaciones.
Como acciones:
Recibimos dos vectores y los utilizamos para rotar las dos esferas que actúan como codos. Es decir, no le limitamos la rotación en ningún eje.
Premios y castigos:
- 10 puntos cada vez que contacta con el Target.
- -0.5 puntos al contactar con el borde del escenario.
- +0.01 cada vez que se acerca al target.
- -0.001 cada vez que se aleja del target.
Resumen.
Se trata de un caracter que hace lo que puede pero que le cuesta desplazarse en linea recta. Durante el proceso de aprendizaje ha aprendido a realizar pequeños saltos hacia el target, su desplazamiento muchas veces es lateral.
Se han realizado diverso procesos de aprendizaje, pero hay tres que son los principales.
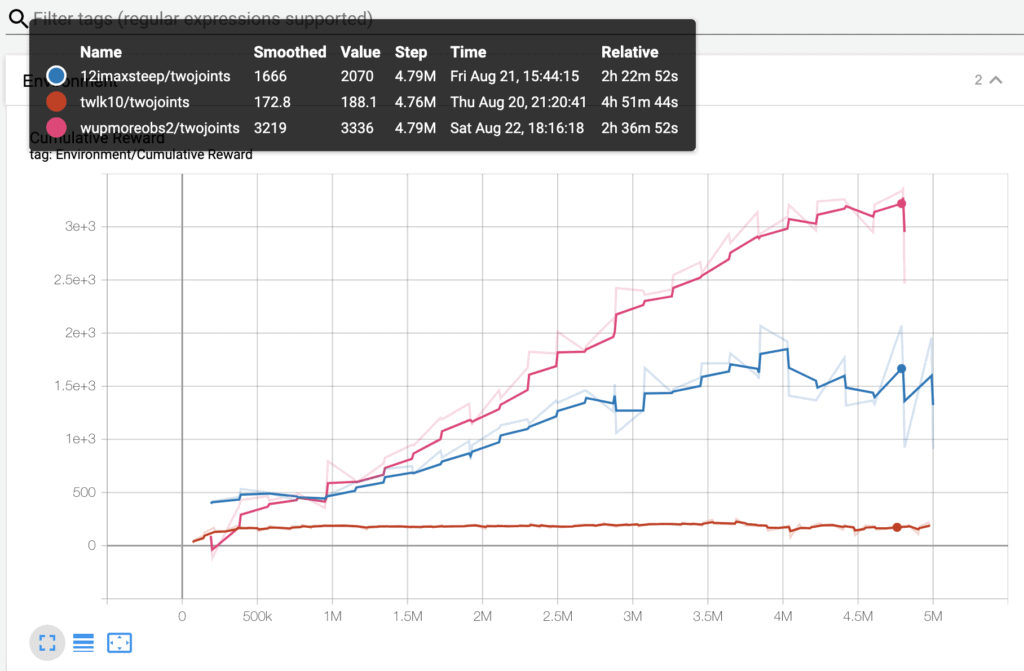
Como veis los resultados son muy diferentes.
- Rojo: El fichero .yaml de configuración estaba claramente limitando las posibilidades del motor de aprendizaje Conda. Para los entrenos posteriores se hacen las siguientes modificaciones.
- batch_size: de 32 a 1024.
- buffer_size: de 1280 a 10240.
- num_epoch: de 8 a 3.
- hidden_units: de 64 a 256.
- Azul: con el nuevo fichero de configuración, se consigue un entre mucho mas eficiente. Aparte se ha pasado de usar 6 agentes simultaneamente a usar 12. Otra modificación ha sido la incorporación de dos RayPerceptionSensor3D que detectan donde están los bordes y el target. Se incorporan dos por que el cubo puede girarse y dejar a uno de los rayperception apuntando al suelo y al cielo, con lo que pierde su efectividad. Al estar girados entre ellos 90 grados siempre tenemos a uno en horizontal.
- Rosa. He incorporado los vectores up de los codos y del cuerpo principal. Es curioso, pero vigilando el entreno me di cuenta que cuando alguno de los agentes se giraba y quedaba boca abajo no conseguia moverse de forma eficiente hacia el target, y eso que no hay una diferencia física. Así que decidi incoporar esos tres vectores a la información observada y la diferencia ha sido bastante significativa.
Las tres veces se han entrenado más o menos unos cinco millones de pasos.
Comments